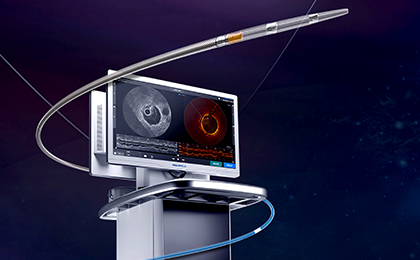
高色彩还原图像、高分辨率光学的镜头,支持多种探头型号,一键切换12MHz、20MHz双频探头,将不同深度图像更清晰的展示对比,帮助医生更快速、准确发现早期病灶,从而提高消化道癌症的早期检出率。
助力让重大疾病实现“早发现、早诊断、早治疗”,为病患延长寿命、恢复健康、减轻病痛。





临床意义
高色彩还原图像、高分辨率光学的镜头,支持多种探头型号,一键切换12MHz、20MHz双频探头,将不同深度图像更清晰的展示对比,帮助医生更快速、准确发现早期病灶,从而提高消化道癌症的早期检出率。
助力让重大疾病实现“早发现、早诊断、早治疗”,为病患延长寿命、恢复健康、减轻病痛。

关于英美达
聚焦重大疾病领域
为临床提供高质量、创新型的诊疗方案
深圳英美达医疗技术有限公司(InnerMedical),成立于2015年,旨在重大疾病领域,为临床提供高质量、创新型的诊疗方案。 主要聚焦于消化道、呼吸道肿瘤及心血管等疾病临床诊疗,通过持续的技术创新, 实现了国产首个内窥镜用诊断超声设备、全高清电子内窥镜、首创双频超声内镜、1.0、1.4mm呼吸探头超声内镜及国际领先的双模成像系统、腔内冲击波等一系列开创性的产品方案, 同时,英美达也在持续不断创新、优化服务,推动医疗技术革新。
公司成立于
技术子方向
专利证书达
建成生产和研发场地